Esitlus üles laadida
Esitlus laaditakse üles. Palun oodake

1
Elektroonika

2
Elektroonika Roboti komponentide juhtimiseks kasutatakse elektrit.
Elektroonika jaguneb Passiivelemendid Pooljuhid Aktiivelemendid Elektroonika

3
Passiiv-elemendid Takisti (Oom) Voolu ja pinget piirav element
Võib olla ka muutuva takistusega Fototakisti, termotakisti Potentsiomeeter Passiiv-elemendid

4
Takisti värvikood

5
Kogum aktiiv- ja passiivkomponentidest ühes korpuses mingi kindla ülesande lahendamiseks
Programmeeritavad kiibid Loogikakiibid Võimenduskiibid Mäluelemendid … = Kiibid

6
Oomi seadust kasutatakse elektrijuhile rakendatud pinge ja juhti läbiva voolutugevuse vahelise sõltuvuse iseloomustamiseks. Voolutugevus juhis on võrdeline juhi otstele rakendatud pingega ja pöördvõrdeline juhi takistusega. I = U / R Oomi seadus

7
Oomi seadus

8
Voolu mõõdame jadamisi tarbijaga, pinget aga paralleelselt.
Takisti väärtus, kui: I=10mA U=5V Oomi seadus

9
Pingejagur on elektriahel, mille väljundpinge moodustab osa sisendpingest. Väljundpinge suurus sõltub elektriahela moodustavate takistite takistuse suhtest. U2 = U1 ⋅ (R2 / (R1 + R2)) Valem tuleneb Ohmi seadusest, mille järgi: I = U1 / (R1 + R2) ning: U2 = I ⋅ R2 Pingejagur
) Valem tuleneb Ohmi seadusest, mille järgi: I = U1 / (R1 + R2) ning: U2 = I ⋅ R2. Pingejagur")
10
LED takisti arvutamine
Valgusdioodi töövoolu on vaja piirata, et kaitsta seda läbi põlemise eest LED takisti arvutamine

11
LED takisti arvutamine
Valgusdioodi töövoolu on vaja piirata, et kaitsta seda läbi põlemise eest R = Ur / If = (Uin - Uf) / If R on takisti takistus. Ur on pingelang takistil. Uin on toitepinge. Uf on LED-i päripinge. If on LED-i voolutugevus. LED takisti arvutamine
 / If. R on takisti takistus. Ur on pingelang takistil. Uin on toitepinge. Uf on LED-i päripinge. If on LED-i voolutugevus. LED takisti arvutamine")
12
LED takisti arvutamine
R = Ur / If = (Uin - Uf) / If R on takisti takistus. Ur on pingelang takistil. Uin on toitepinge. Uf on LED-i päripinge. If on LED-i voolutugevus.
 / If. R on takisti takistus. Ur on pingelang takistil. Uin on toitepinge. Uf on LED-i päripinge. If on LED-i voolutugevus")
13
Toiteallikad Patareid Akud Kütused Adapterid
Lihtsad, odavad vooluallikad Akud Taaslaetavad, väga palju erinevaid tehnoloogiaid Kütused Põlemis / keemilise reaktsiooniga saadav energia muundatakse elektrienergiaks Adapterid Vooluvõrgust saadav energia, mis alaldatakse vajalikuks pingeks kasutades trafot või toiteblokki Toiteallikad

14
Akud Pliiakud Nikkelakud Odavad ja lihtsad akud
Kasutatakse peamiselt autodes ja UPSides Madal energiatihedus Nikkelakud Enamlevinud akud koduelektroonikas (NiMH, NiCd) Suhteliselt hea mahtuvusega ning hinnaga Ohutud Iseeneslik tühjenemine Mäluefekt Akud
 Suhteliselt hea mahtuvusega ning hinnaga. Ohutud. Iseeneslik tühjenemine. Mäluefekt. Akud")
15
Akud Liitiumakud Väga hea energiatihedusega
Võimaldab väga suuri voolusid Kardavad ülelaadimist ja liiga tühjaks laadimist, lühist, äärmuslikke temperatuure Akud

16
Akude ühendamine

17
Stabiilse pinge saamiseks kasutame pingeregulaatoreid
Pinge- regulaatorid

18
Seade, mis muundab mingi füüsikalise suuruse elektrisignaaliks.
Ümbritseva keskkonna tajumiseks Mida rohkem andureid, seda täpsemini oskab robot oma käitumist planeerida Jagunevad Analoogandurid Digitaalandurid Andurid

19
Lihtsalt kasutatavad andurid, 2 olekut: „On“ või „Ei ole“
Lülitid, Koodrid, diskreetoptika Digitaal- andurid

20
Analoog- andurid Selleks, et analoog andureid kasutada
on vaja analoogsignaali digitaalseks muundada Väljundiks on muutuv pinge Tüüpilised andurid Kaugusandurid Keskkonna andurid

21
Targad andurid Andurid, millesse on sisse ehitatud mõõteloogika
Juhitavad üle andmesiini UART, SPI, TWI, USB, PWM Targad andurid

22
HC-SR04 Ultraheli kaugusandur Lai nägemisväli Odav Suhteliselt täpne
Ei sõltu materjali värvist HC-SR04

23
• Infrapuna jooneandur 8 optopaariga ja juhitava LED olekuga – Mõõtekaugus 3mm maapinnast – 9.5mm anduritevaheline kaugus – Analoogväljund (mõõdetav ka digitaalsisendiga) ; 6/8 kanalit Jooneandur QR

24
Mootorid Elektrienergia muundamine mehaaniliseks liikumiseks
Olulised parameetrid: Voolu eripära ja tarve, mõõtmed, kinnitus, juhtimise keerukus, pöörlemiskiirus (rpm), pöördemoment Jagunevad: Alalisvoolumootor Vahelduvvoolu mootor Servo mootor Samm-mootor Mootorid
, pöördemoment. Jagunevad: Alalisvoolumootor. Vahelduvvoolu mootor. Servo mootor. Samm-mootor. Mootorid")
25
Alalisvoolu mootor Töötab alalisvoolul
Kiirus lihtsasti reguleeritav pingega Suur pöörlemiskiirus Kasutamiseks vaja lisada reduktor Kaotad kiiruses, võidad jõus Alalisvoolu mootor Võiks teha mõne ülesande ülekande arvutamiseks ning roboti jõu arvutamiseks!

26
Mootorite juhtimine Kiiruse reguleerimine pingega PWM
Pulsilaius-modulatsioon (PWM) on signaali tüüp mille sagedus ja ühtlasi ka perioodi pikkus on konstantne (enamasti) kuid mõlema poolperioodi pikkus on muutuv. PWM signaale kasutatakse elektromehaaniliste, optiliste, jms. seadmete juhtimiseks. Näiteks mudelismist tuntud servomootorite PWM signaal on 50Hz sagedusega ja 1ms kuni 2ms pikkuse kõrge poolperioodiga. Mootorite juhtimine
 on signaali tüüp mille sagedus ja ühtlasi ka perioodi pikkus on konstantne (enamasti) kuid mõlema poolperioodi pikkus on muutuv. PWM signaale kasutatakse elektromehaaniliste, optiliste, jms. seadmete juhtimiseks. Näiteks mudelismist tuntud servomootorite PWM signaal on 50Hz sagedusega ja 1ms kuni 2ms pikkuse kõrge poolperioodiga. Mootorite juhtimine")
27
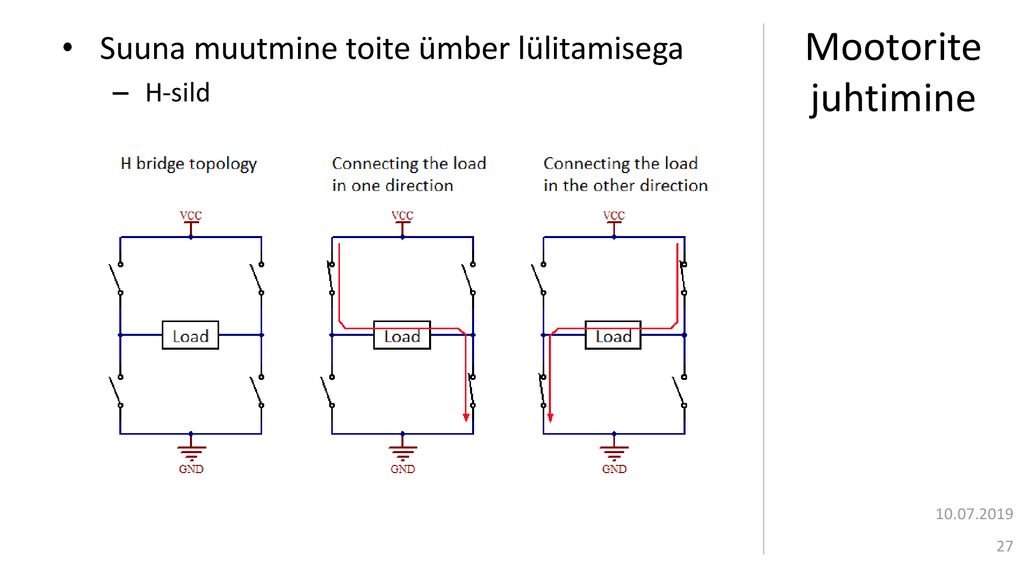
Mootorite juhtimine Suuna muutmine toite ümber lülitamisega H-sild
28
e-mail: robotiklubi@robotiklubi.ee
Harri Oras tel

Seotud esitlused






